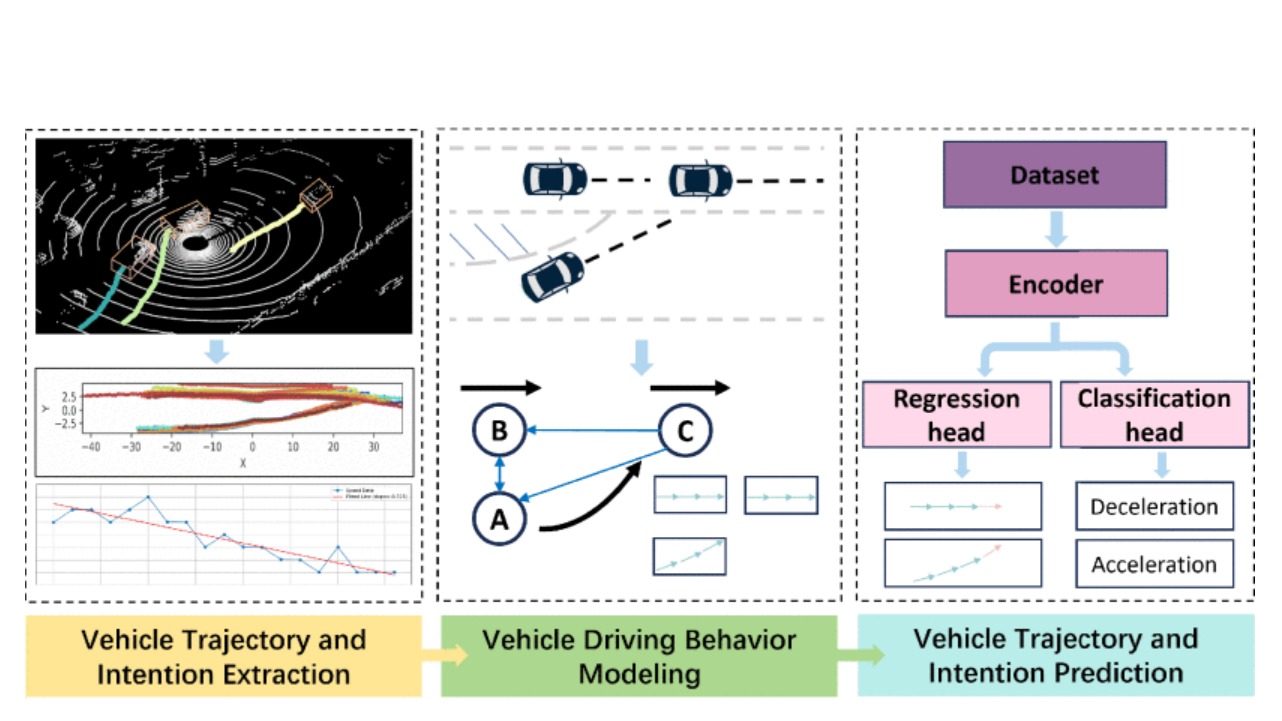
[2026-004] A Driving Trajectory and Intention Prediction Framework for Vehicle in Merging Zones Using Roadside LiDAR
Authors:
Ciyun Lin, Yujia Wang, Bowen Gong, Hongchao Liu
Journal:
IEEE Transactions on Automation Science and Engineering 2026, 23, 4442-4453
DOI:
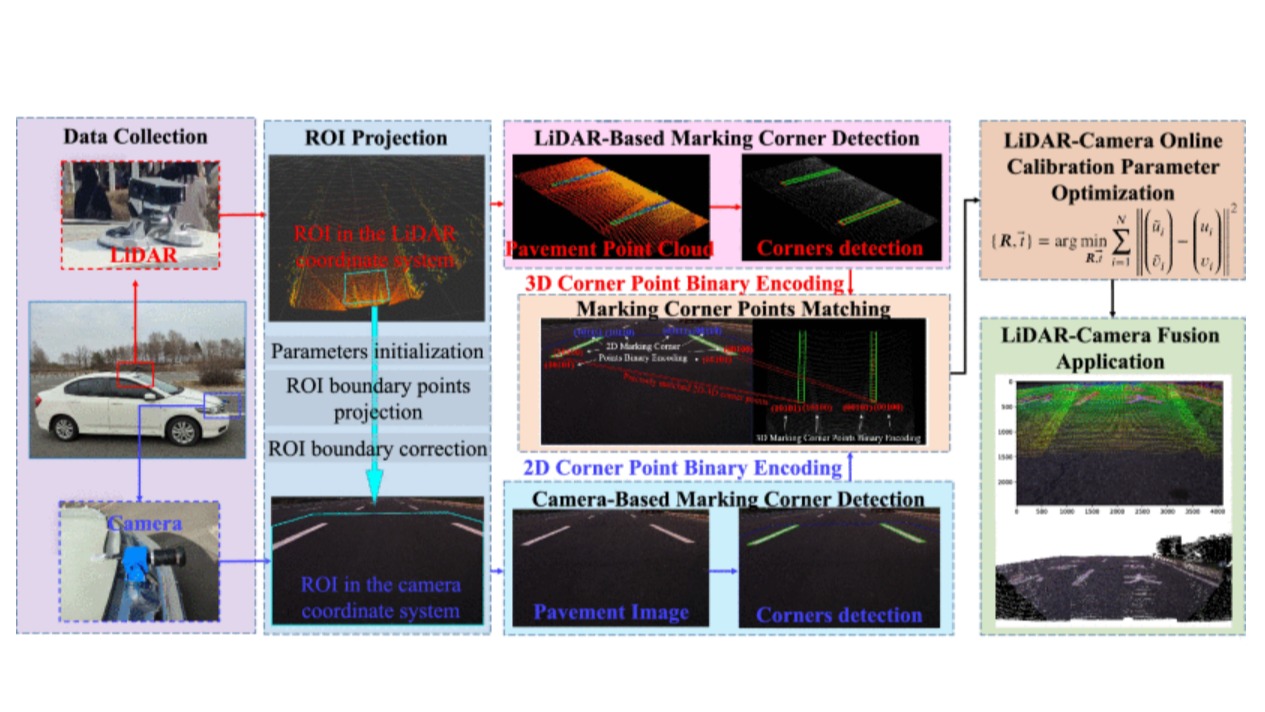
[2026-003] Onboard LiDAR–Camera Online Calibration With Pavement Marking Corner Points for Pavement Distress Fusion Detection
Authors:
Ganghao Sun, Ciyun Lin, Yue Wang, Bowen Gong, Hongchao Liu
Journal:
IEEE Transactions on Instrumentation and Measurement 2026, 75, 1-16
DOI:
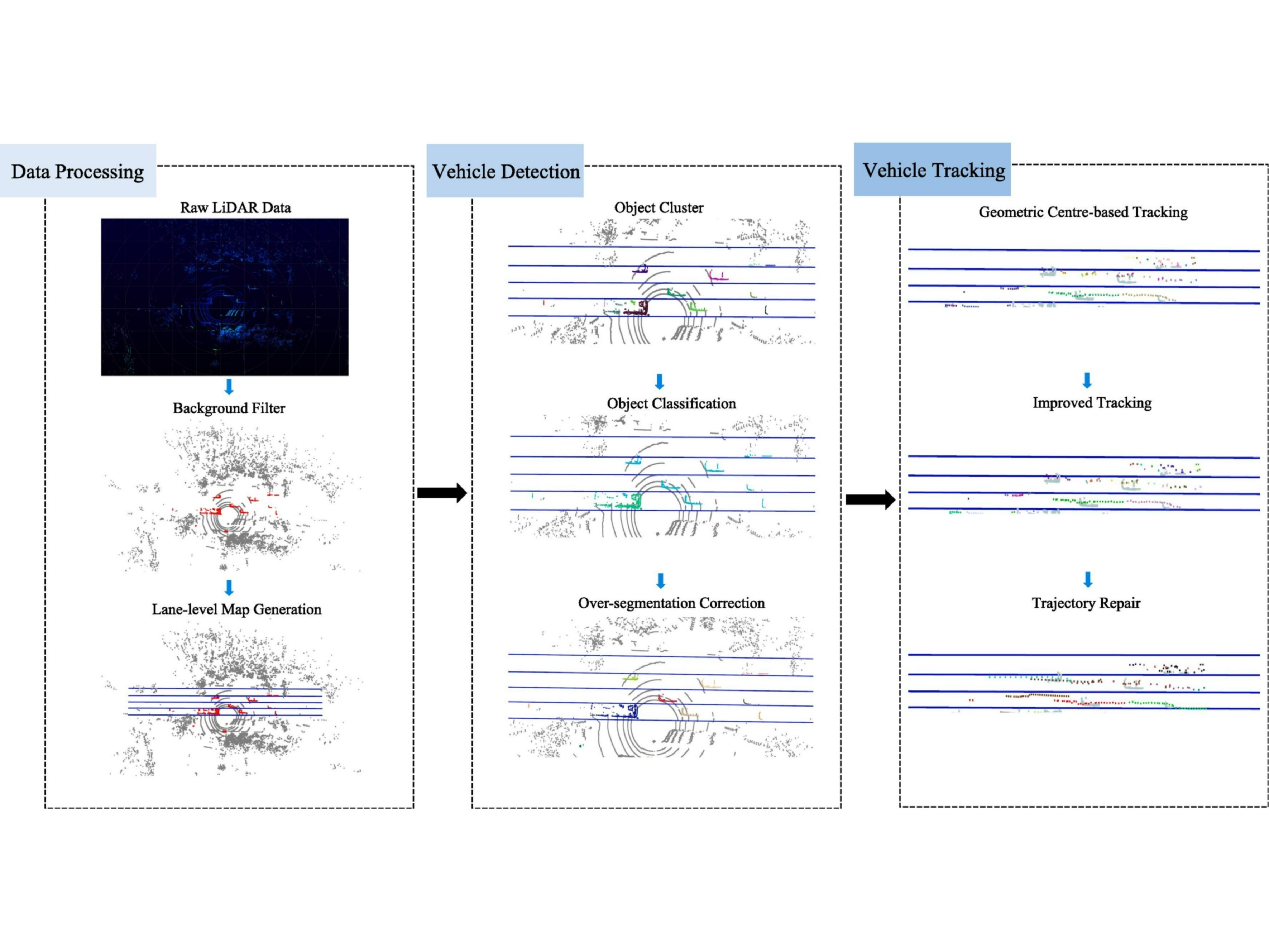
[2026-002] A ground segmentation method for roadside LiDAR with uncertain installation posture
Authors:
Hui Liu, Ciyun Lin, Bowen Gong, Hongchao Liu
Journal:
Optics & Laser Technology 2026, 200, 115117
DOI:
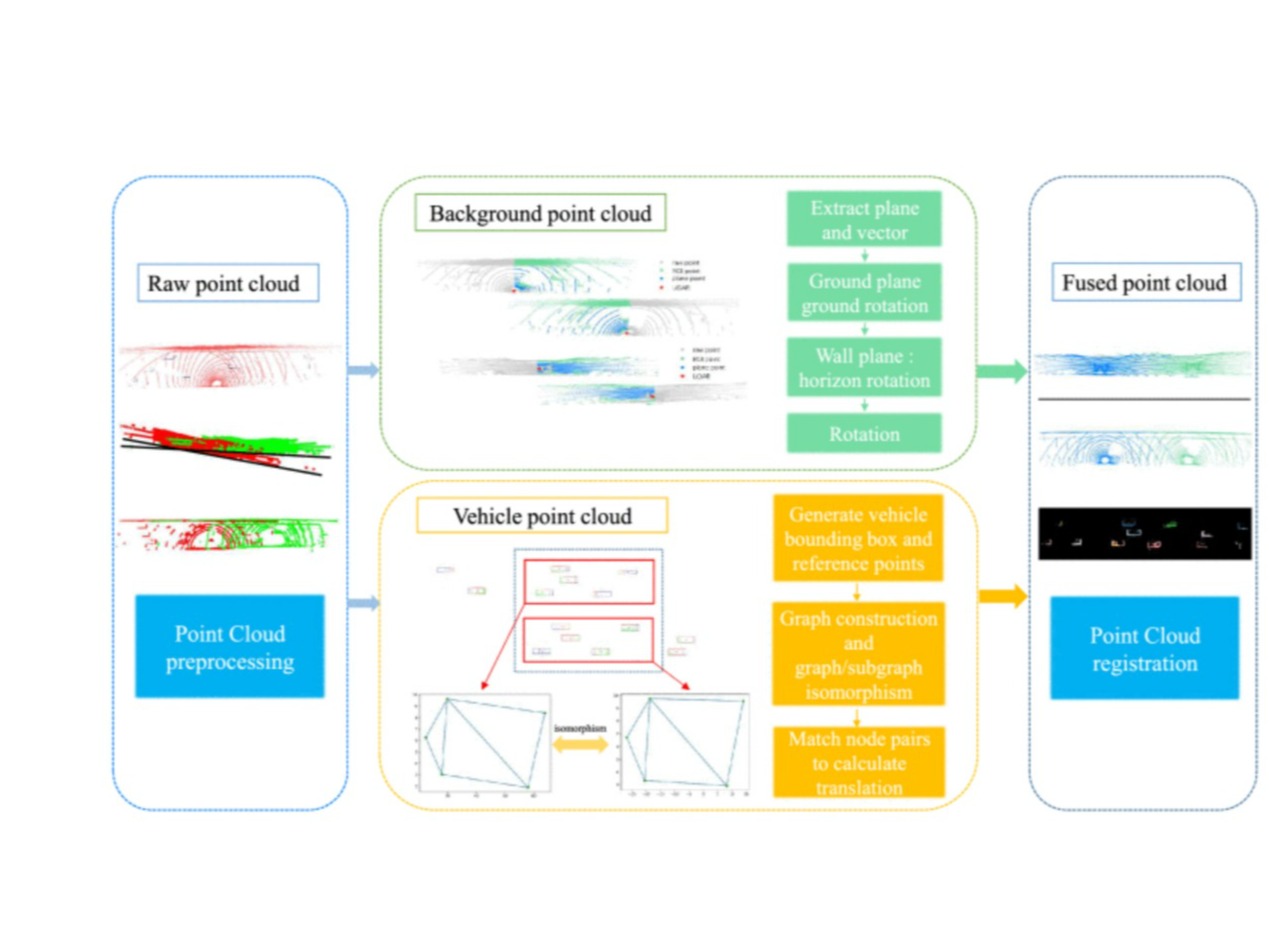
[2026-001] Point Cloud Registration for Traffic Flow Holographic Perception in Tunnel Environments Using Roadside LiDARs
Authors:
Bowen Gong, Huizi Hu, Ciyun Lin, Hongchao Liu
Journal:
IEEE Internet of Things Journal 2026, 13(7), 14454-14464
DOI:
Copyright © 版权所有:吉林大学-吉林省智能交通工程研究中心
地址:中国吉林省长春市南关区人民大街5988号
邮编:130022 电话:0431-85095891