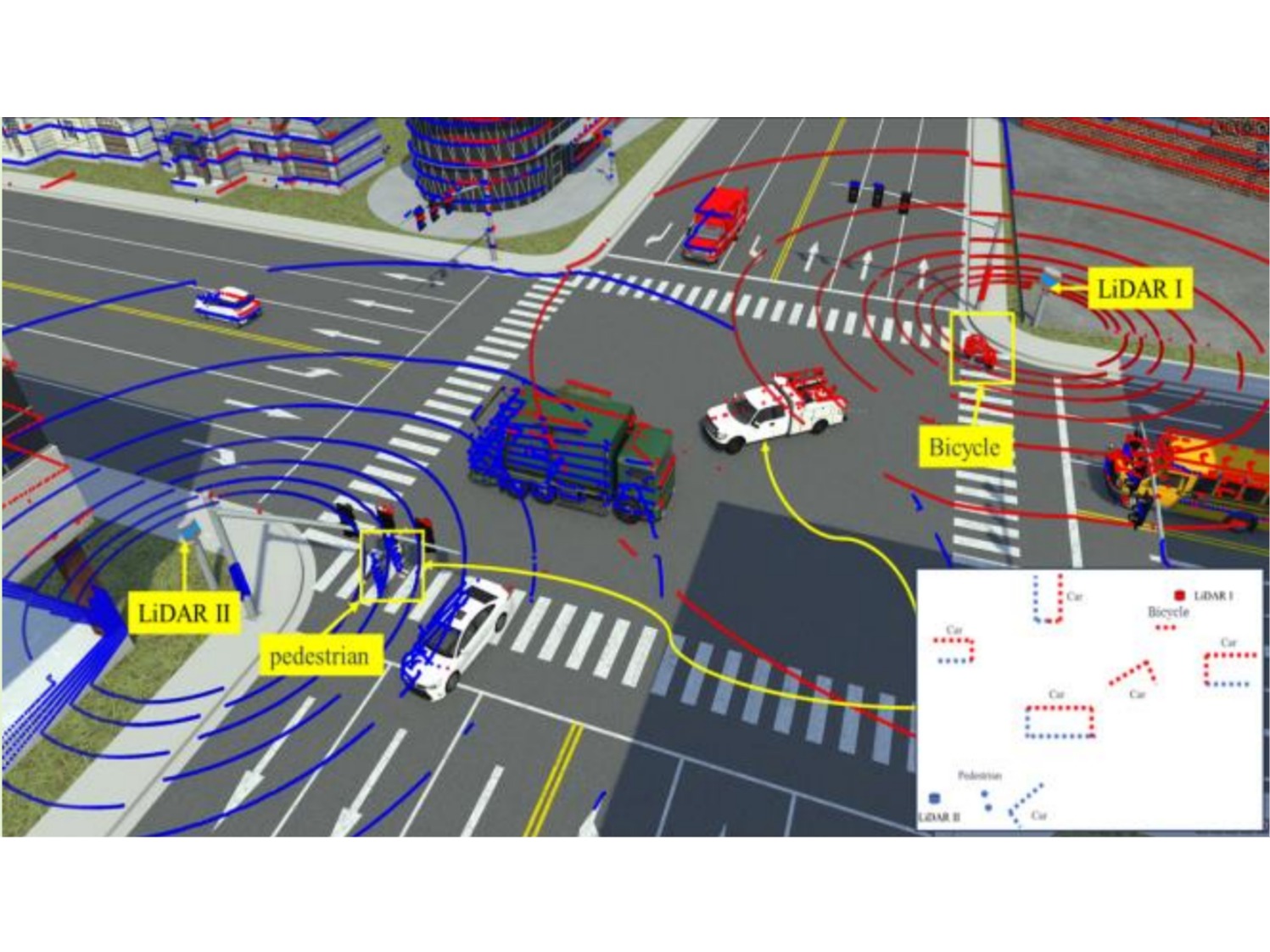
[2024-005] Vehicle Reference-Based Point Cloud Registration for Low-Channel Roadside LiDARs
Authors:
Ciyun Lin, Shuangjie Deng, Bowen Gong, Hongchao Liu
Journal:
IEEE Sensors Journal 2024, 25(1)
DOI:
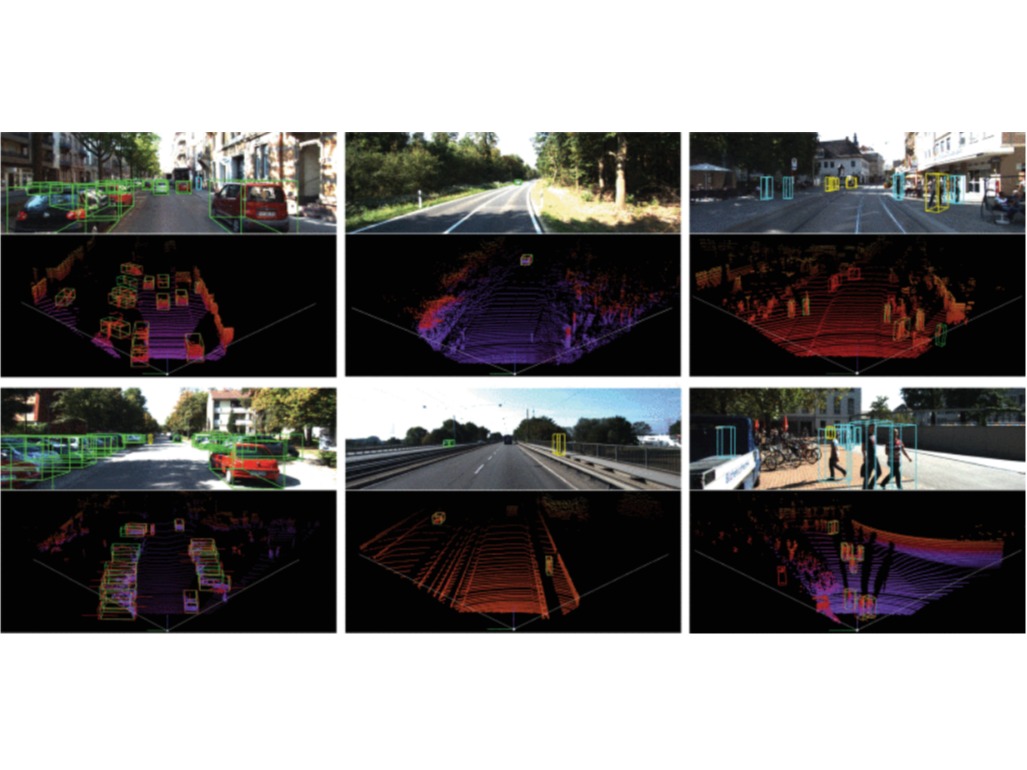
[2024-004] Dense Sequential Fusion: Point Cloud Enhancement using Foreground Mask Guidance for Multimodal 3D Object Detection
Authors:
Chen Xie, Ciyun Lin, Xiaoyu Zheng, Bowen Gong, Hongchao Liu
Journal:
IEEE Transactions on Instrumentation and Measurement 2024, 73, 9501015
DOI:
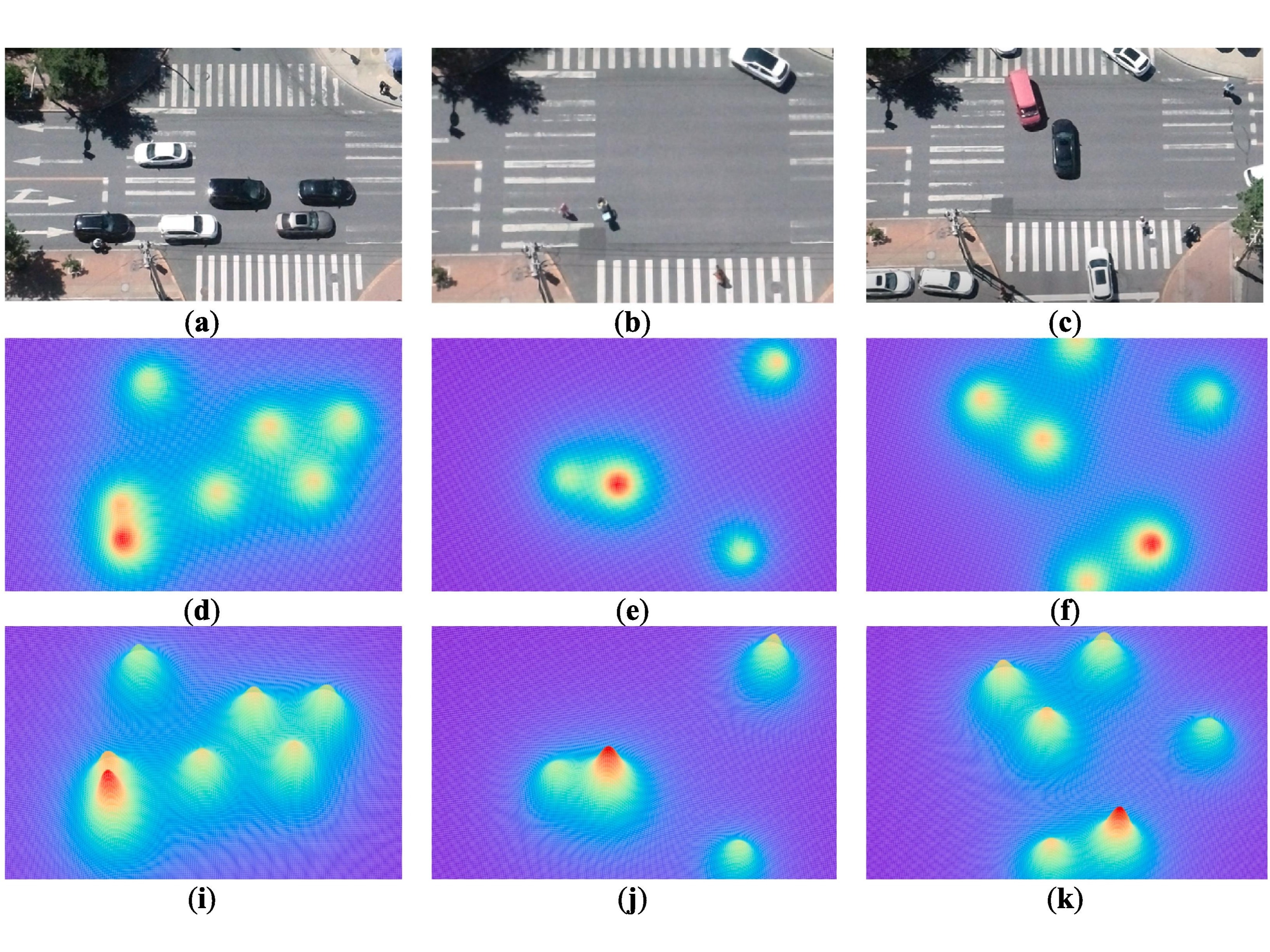
[2024-003] Near-crash risk identification and evaluation for takeout delivery motorcycles using roadside LiDAR
Authors:
Ciyun Lin, Shaoqi Zhang, Bowen Gong, Hongchao Liu
Journal:
Accident Analysis & Prevention, 2024, 199: 107520
DOI:
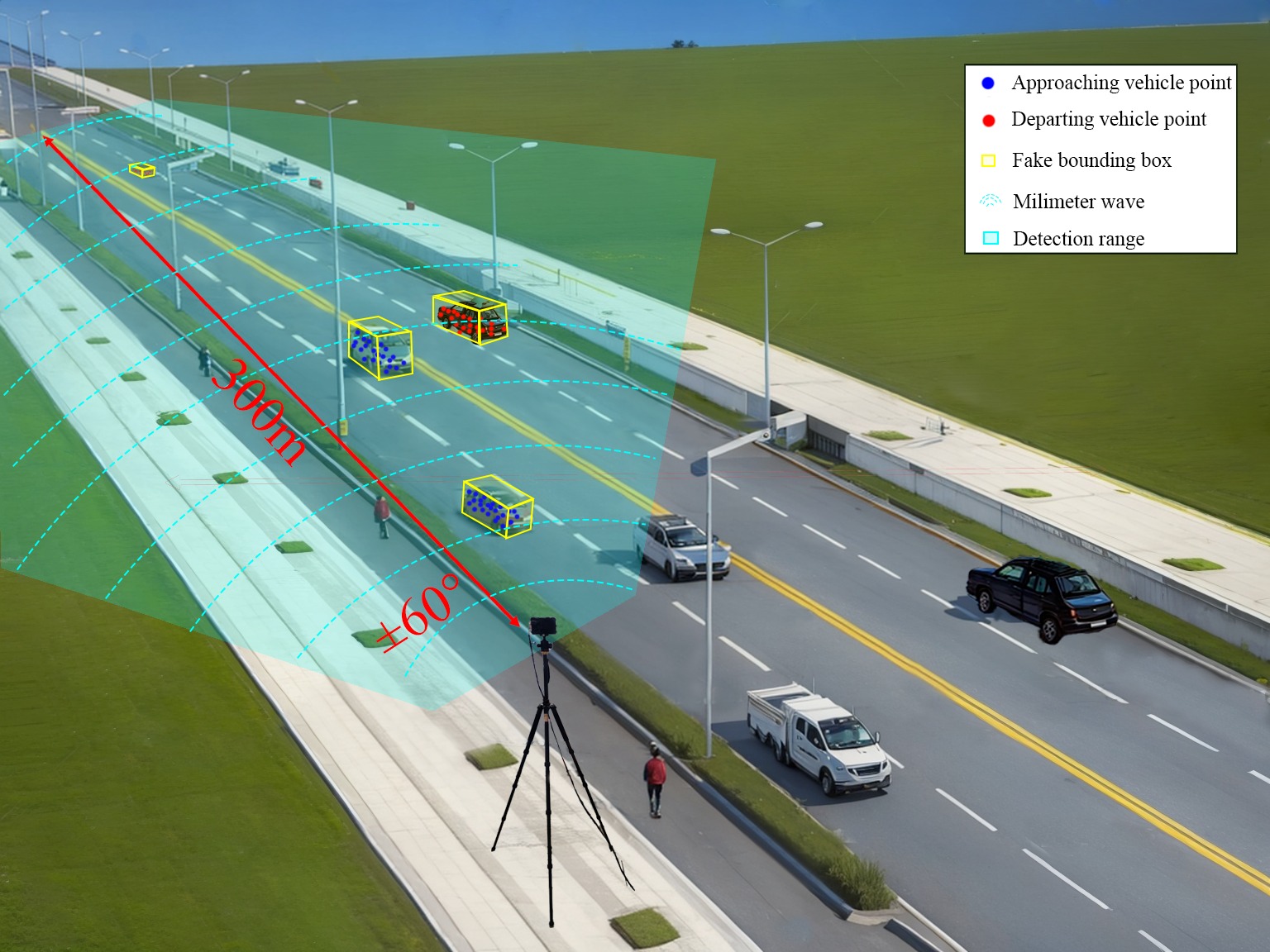
[2024-002] Louvain-Based Traffic Object Detection for Roadside 4D Millimeter-Wave Radar
Authors:
Bowen Gong, Jinghang Sun, Ciyun Lin, Hongchao Liu, Ganghao Sun
Journal:
Remote Sensing, 2024, 16(2): 366.
DOI:
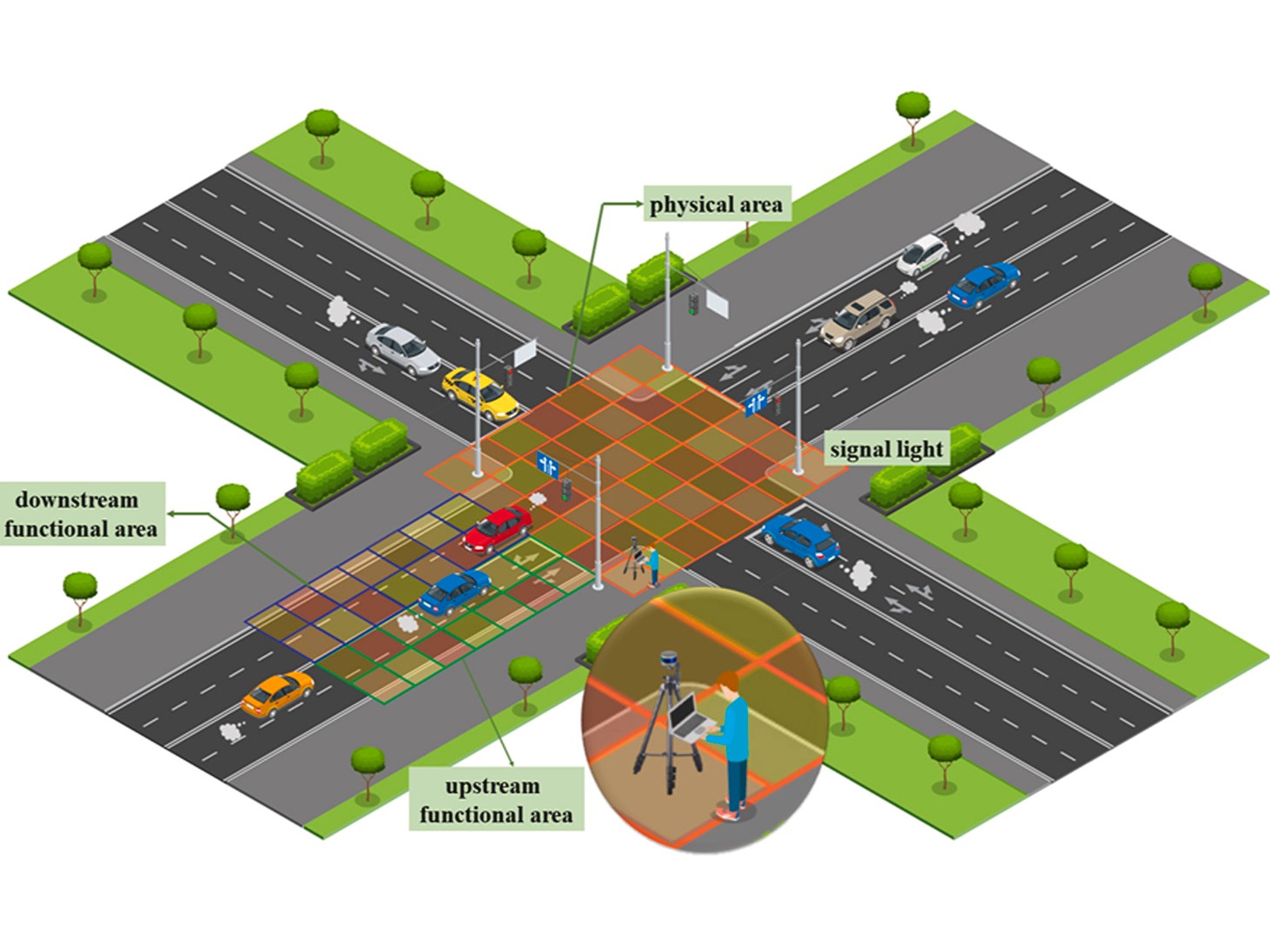
[2024-001] Trajectory-based vehicle emission evaluation for signalized intersection using roadside LiDAR data
Authors:
Yue Wang, Ciyun Lin, Binwen Zhao, Bowen Gong, Hongchao Liu
Journal:
Journal of Cleaner Production, 2024, 440: 140971.
DOI:
Copyright © 版权所有:吉林大学-吉林省智能交通工程研究中心
地址:中国吉林省长春市南关区人民大街5988号
邮编:130022 电话:0431-85095891